
Akvarijní rybky a řízení vozidel není zrovna téma, které by se dalo očekávat pohromadě v jednom článku, ale na světě je už přinejmenším jedna malá zlatá rybka, která dokáže ve svém mobilním akvárku je tam, kam chce.
Máme tu tak sklouben svět robotiky a biologie se zaměřením na výzkum chování zvířat. V podstatě tu jde o poměrně jednoduchou věc, pokud si tedy klademe za cíl ji jen pochopit.
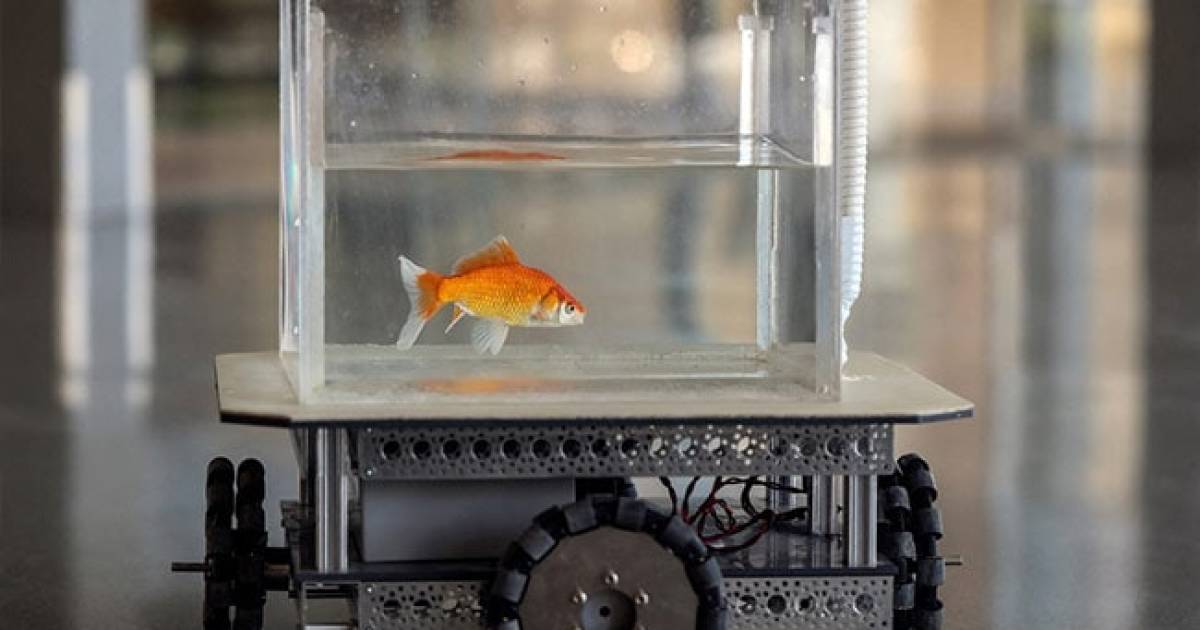
Máme tu platformu s kolečky, která je schopna pohybovat se všemi směry. Na ní sedí malé akvárko s rybím hrdinou a nad ním je pak kamera namířená přímo dolů, která snímá pozici a orientaci rybího těla a vedle toho je tu i LIDAR sledující okolí a sloužící jako pojistka před havárií. Data pak zpracovává Raspberry Pi 3B+ se softwarem pro rozpoznávání obrazu a vyhodnocuje, jakým směrem je rybka natočená a kam se aktuálně snaží plavat, což pak už prostě jen využije pro ovládání směru pohybu celé platformy.
Zbývá ale jedna podstatná věc, a sice naučit rybku jezdit. To bylo zajištěno, jak jinak, pomocí odměny pro její žaludek a prvním cílem bylo ji přimět k tomu, aby svým "vozidlem" dojela k růžově zbarvené části zdi. A to přesně k ní, neboť ke konci videa můžeme vidět, jak je rybka už se zaseklá přímo u zdi, ale ne na zcela správném místě. V ten moment se ukáže, že se naučila i couvnout, aby pak mohla už dojet přímo k růžové. Poté výzkumníci zkoušeli rybku i zmást tím, že do místnosti přidávali další barvy, což ale po několika pokusech dokázala prohlédnout a pak už zamířila k vytoužené růžové barvě a s ní spojené odměně.
Jedná se tu o práci výzkumníků z izraelské Ben-Gurion University, která byla prezentována v edici Behavioural Brain Research na Science Direct.